چگونه یک سیستم معادلات دیفرانسیل را با استفاده از روش عملیاتی حل کنیم؟ حل سیستم های معادلات دیفرانسیل به روش ماتریسی.
بسیاری از سیستم ها معادلات دیفرانسیلهمگن و هم ناهمگن را می توان به یک معادله برای یک تابع مجهول واحد تقلیل داد. بیایید روش را با مثال نشان دهیم.
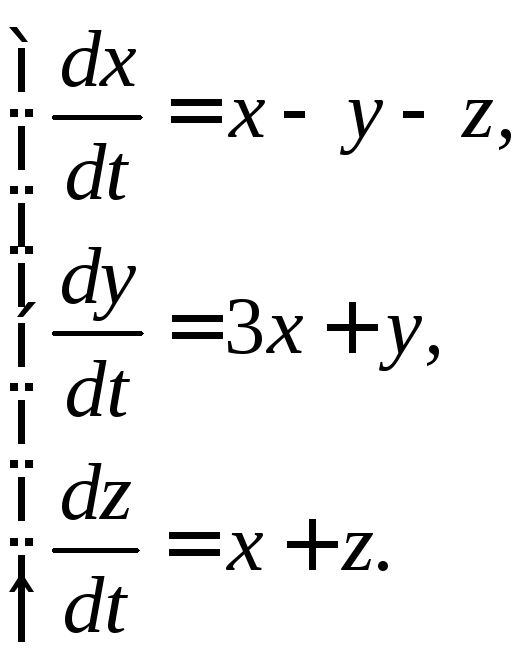
مثال 3.1.سیستم را حل کنید
راه حل. 1) متمایز کردن با توجه به تیمعادله اول و استفاده از معادله دوم و سوم برای جایگزینی  و
و  ، ما پیدا می کنیم
، ما پیدا می کنیم
معادله حاصل با توجه به قابل تفکیک است  از نو
از نو
1) ما یک سیستم می سازیم

از دو معادله اول سیستم، متغیرها را بیان می کنیم  و
و  از طریق
از طریق  :
:
اجازه دهید عبارات یافت شده را جایگزین کنیم  و
و  به معادله سوم سیستم
به معادله سوم سیستم
بنابراین، برای پیدا کردن تابع  یک معادله دیفرانسیل مرتبه سوم با ضرایب ثابت به دست آورد
یک معادله دیفرانسیل مرتبه سوم با ضرایب ثابت به دست آورد
 .
.
2) آخرین معادله را با روش استاندارد ادغام می کنیم: معادله مشخصه را می سازیم  ، ریشه های آن را پیدا کنید
، ریشه های آن را پیدا کنید  و ساختن تصمیم مشترکبه عنوان یک ترکیب خطی از توان، با در نظر گرفتن تعدد یکی از ریشه ها:.
و ساختن تصمیم مشترکبه عنوان یک ترکیب خطی از توان، با در نظر گرفتن تعدد یکی از ریشه ها:.
3) بعد دو ویژگی باقی مانده را پیدا کنید  و
و  ، تابع دوبار بدست آمده را متمایز می کنیم
، تابع دوبار بدست آمده را متمایز می کنیم 
با استفاده از اتصالات (3.1) بین توابع سیستم، مجهولات باقی مانده را بازیابی می کنیم
 .
.
پاسخ.
, ,.
,.
ممکن است معلوم شود که تمام توابع شناخته شده به جز یکی از سیستم مرتبه سوم حتی پس از یک تمایز منفرد حذف می شوند. در این صورت ترتیب معادله دیفرانسیل برای یافتن آن کمتر از تعداد توابع مجهول در سیستم اصلی خواهد بود.
مثال 3.2.سیستم را یکپارچه کنید
 (3.2)
(3.2)
راه حل. 1) متمایز کردن با توجه به  معادله اول را پیدا می کنیم
معادله اول را پیدا می کنیم
به استثنای متغیرها  و
و  از معادلات
از معادلات

ما یک معادله مرتبه دوم با توجه به 
 (3.3)
(3.3)
2) از معادله اول سیستم (3.2) داریم
 (3.4)
(3.4)
با جایگزینی معادله سوم سیستم (3.2) عبارات (3.3) و (3.4) برای  و
و  ، یک معادله دیفرانسیل مرتبه اول برای تعیین تابع بدست می آوریم
، یک معادله دیفرانسیل مرتبه اول برای تعیین تابع بدست می آوریم 

ادغام این نیست معادله همگنبا ضرایب ثابت مرتبه اول، پیدا می کنیم  با استفاده از (3.4)، تابع را پیدا می کنیم
با استفاده از (3.4)، تابع را پیدا می کنیم 
پاسخ.
 ,,
,, .
.
وظیفه 3.1. حل سیستم های همگن با کاهش به یک معادله دیفرانسیل.
3.1.1. 3.1.2.
3.1.3.
 3.1.4.
3.1.4.

3.1.5.
 3.1.6.
3.1.6.

3.1.7.
 3.1.8.
3.1.8.

3.1.9.
 3.1.10.
3.1.10.

3.1.11.
 3.1.12.
3.1.12.

3.1.13.
 3.1.14.
3.1.14.

3.1.15.
 3.1.16.
3.1.16.

3.1.17.
 3.1.18.
3.1.18.

3.1.19.
 3.1.20.
3.1.20.

3.1.21.
 3.1.22.
3.1.22.

3.1.23.
 3.1.24.
3.1.24.

3.1.25.
 3.1.26.
3.1.26.

3.1.27.
 3.1.28.
3.1.28.

3.1.29.
 3.1.30.
3.1.30.

3.2. حل سیستم معادلات دیفرانسیل همگن خطی با ضرایب ثابت با یافتن یک سیستم اساسی از راه حل ها
حل کلی یک سیستم معادلات دیفرانسیل همگن خطی را می توان به صورت ترکیبی خطی از جواب های اساسی سیستم یافت. در مورد سیستم هایی با ضرایب ثابتاز روش های جبر خطی می توان برای یافتن راه حل های اساسی استفاده کرد.
مثال 3.3.سیستم را حل کنید
 (3.5)
(3.5)
راه حل. 1) سیستم را به صورت ماتریسی بازنویسی کنید
 . (3.6)
. (3.6)
2) ما به دنبال تصمیم اساسیسیستم هایی که به عنوان یک بردار مشخص می شوند  . توابع جایگزین
. توابع جایگزین  در (3.6) و کاهش توسط
در (3.6) و کاهش توسط  ، ما گرفتیم
، ما گرفتیم

 , (3.7)
, (3.7)
این عدد است  باید باشد شماره خودماتریس ها
باید باشد شماره خودماتریس ها  و بردار
و بردار  بردار ویژه مربوطه
بردار ویژه مربوطه
3) از درس جبر خطی معلوم می شود که سیستم (3.7) در صورتی که تعیین کننده آن برابر با صفر باشد راه حل غیر بی اهمیتی دارد.
 ,
,
به این معنا که . از اینجا مقادیر ویژه را پیدا می کنیم  .
.
4) بردارهای ویژه مربوطه را بیابید. جایگزینی با (3.7) مقدار اول  ، سیستمی برای یافتن اولین بردار ویژه به دست می آوریم
، سیستمی برای یافتن اولین بردار ویژه به دست می آوریم


از اینجا به ارتباط بین مجهولات می رسیم  . کافی است یک راه حل غیر پیش پا افتاده را انتخاب کنیم. با فرض اینکه
. کافی است یک راه حل غیر پیش پا افتاده را انتخاب کنیم. با فرض اینکه  ، سپس
، سپس  ، یعنی بردار
، یعنی بردار  مقدار ویژه برای ارزش ویژه است
مقدار ویژه برای ارزش ویژه است  و بردار تابع
و بردار تابع  حل اساسی سیستم معادلات دیفرانسیل داده شده (3.5). به طور مشابه، هنگام جایگزینی ریشه دوم
حل اساسی سیستم معادلات دیفرانسیل داده شده (3.5). به طور مشابه، هنگام جایگزینی ریشه دوم  در (3.7) داریم معادله ماتریسیبرای بردار ویژه دوم
در (3.7) داریم معادله ماتریسیبرای بردار ویژه دوم  . ارتباط بین اجزای آن را از کجا بدست آوریم
. ارتباط بین اجزای آن را از کجا بدست آوریم  . بنابراین، راه حل اساسی دوم را داریم
. بنابراین، راه حل اساسی دوم را داریم
 .
.
5) جواب کلی سیستم (3.5) به صورت ترکیب خطی از دو راه حل اساسی به دست آمده ساخته شده است.

یا به صورت مختصات

 .
.
پاسخ.

 .
.
وظیفه 3.2. حل سیستم ها با یافتن سیستم اساسی راه حل ها.
ما تصمیم گرفتیم این بخش را به حل سیستم های معادلات دیفرانسیل با ساده ترین شکل اختصاص دهیم. 1 , a 2 , b 2 , c 2 برخی از اعداد واقعی هستند. موثرترین روش برای حل این گونه سیستم های معادلات، روش انتگرال گیری است. بیایید یک راه حل مثال در مورد موضوع را نیز در نظر بگیریم.
راه حل سیستم معادلات دیفرانسیل یک جفت تابع x (t) و y (t) خواهد بود که قادر است هر دو معادله سیستم را به یک هویت تبدیل کند.
روش ادغام سیستم معادلات دیفرانسیل d x d t = a 1 x + b 1 y + c 1 d y d t = a 2 x + b 2 y + c 2 را در نظر بگیرید. x را از معادله 2 سیستم بیان می کنیم تا تابع مجهول x (t) را از معادله 1 حذف کنیم:
d y d t = a 2 x + b 2 y + c 2 ⇒ x = 1 a 2 d y d t - b 2 y - c 2
اجازه دهید معادله 2 را با توجه به تیو معادله آن را برای d x d t حل کنید:
d 2 y d t 2 = a 2 d x d t + b 2 d y d t ⇒ d x d t = 1 a 2 d 2 y d t 2 - b 2 d y d t
حال بیایید نتیجه محاسبات قبلی را با معادله 1 سیستم جایگزین کنیم:
d x d t = a 1 x + b 1 y + c 1 ⇒ 1 a 2 d 2 y d t 2 - b 2 d y d t = a 1 a 2 d y d t - b 2 y - c 2 + b 1 y + c 1 ⇔ d t 2 -y (a 1 + b 2) d y d t + (a 1 b 2 - a 2 b 1) y = a 2 c 1 - a 1 c 2
بنابراین، ما تابع مجهول x (t) را حذف کردیم و یک DE ناهمگن خطی از مرتبه 2 با ضرایب ثابت به دست آوردیم. بیایید جواب این معادله y (t) را پیدا کرده و آن را با معادله 2 سیستم جایگزین کنیم. بیایید پیدا کنیم x(t). ما فرض می کنیم که این حل سیستم معادلات را کامل می کند.
مثال 1
جواب سیستم معادلات دیفرانسیل را پیدا کنید d x d t = x - 1 d y d t = x + 2 y - 3
راه حل
بیایید با اولین معادله سیستم شروع کنیم. بیایید آن را با توجه به x حل کنیم:
x = d y d t - 2 y + 3
حال بیایید تمایز معادله 2 سیستم را انجام دهیم و پس از آن آن را با توجه به d x d t حل می کنیم:
ما می توانیم نتیجه به دست آمده در طول محاسبات را با معادله 1 سیستم DE جایگزین کنیم:
d x d t = x - 1 d 2 y d t 2 - 2 d y d t = d y d t - 2 y + 3 - 1 d 2 y d t 2 - 3 d y d t + 2 y = 2
در نتیجه تبدیل ها، یک معادله دیفرانسیل ناهمگن خطی از مرتبه 2 با ضرایب ثابت d 2 y d t 2 - 3 d y d t + 2 y = 2 به دست آورده ایم. اگر جواب کلی آن را پیدا کنیم، تابع را دریافت می کنیم y(t).
راه حل کلی LODE y 0 مربوطه را می توان با محاسبه ریشه ها پیدا کرد معادله مشخصه k 2 - 3 k + 2 = 0:
D \u003d 3 2 - 4 2 \u003d 1 k 1 \u003d 3 - 1 2 \u003d 1 k 2 \u003d 3 + 1 2 \u003d 2
ریشه هایی که ما دریافت کرده ایم معتبر و متمایز هستند. در این رابطه راه حل کلی LODE به شکل y 0 = C 1 · e t + C 2 · e 2 t خواهد بود.
حالا بیایید یک راه حل خاص برای خطی ناهمگن DE y ~ پیدا کنیم:
d 2 y d t 2 - 3 d y d t + 2 y = 2
سمت راست معادله چند جمله ای درجه صفر است. این بدان معنی است که ما به دنبال یک راه حل خاص به شکل y ~ = A خواهیم بود که در آن A یک ضریب نامشخص است.
ما می توانیم ضریب نامشخص را از برابری d 2 y ~ d t 2 - 3 d y ~ d t + 2 y ~ = 2 تعیین کنیم:
d 2 (A) d t 2 - 3 d (A) d t + 2 A = 2 ⇒ 2 A = 2 ⇒ A = 1
بنابراین، y ~ = 1 و y (t) = y 0 + y ~ = C 1 · e t + C 2 · e 2 t + 1 . ما یک تابع ناشناخته پیدا کردیم.
حالا تابع پیدا شده را جایگزین معادله 2 سیستم DE می کنیم و معادله جدید را با توجه به x(t):
d (C 1 e t + C 2 e 2 t + 1) d t = x + 2 (C 1 e t + C 2 e 2 t + 1) - 3 C 1 e t + 2 C 2 e 2 t = x + 2 C 1 e t + 2 C 2 e 2 t - 1 x = - C 1 e t + 1
بنابراین تابع مجهول دوم x (t) = - C 1 · e t + 1 را محاسبه کردیم.
پاسخ: x (t) = - C 1 e t + 1 y (t) = C 1 e t + C 2 e 2 t + 1
اگر متوجه اشتباهی در متن شدید، لطفاً آن را برجسته کرده و Ctrl+Enter را فشار دهید
سیستم های معادلات دیفرانسیل دو نوع اصلی هستند - همگن خطی و ناهمگن. شما همچنین می توانید سیستم های معادلات دیفرانسیل را به دو روش اصلی حل کنید:
- روش حذف که ماهیت آن این است که در فرآیند حل سیستم معادلات دیفرانسیل فقط به یک معادله دیفرانسیل کاهش می یابد.
- با استفاده از معادله مشخصه یا روش اویلر.
اصولاً سیستم های معادلات دیفرانسیل با روش اول حل می شوند.
سیستم های همگن خطی معادلات دیفرانسیل
ساده ترین سیستم همگن معادلات دیفرانسیل را می توان به صورت زیر نشان داد:
جایی که k، l، m، n اعداد معمولی هستند، x(t) و y(t) توابع مجهول هستند. متغیر t نقش یک متغیر مستقل را بازی می کند (در معادله دیفرانسیل معمول، x معمولا در جای خود قرار می گیرد).
و اولین مشتقات توابع مجهول x(t) و y(t) هستند.
حل یک سیستم معادلات دیفرانسیل به معنای تعیین توابع x(t) و y(t) است که هر دو معادله سیستم را برآورده می کند. همانطور که می بینید، همه چیز بسیار شبیه به سیستم های معمولی است. معادلات خطی، تنها تفاوت این است که ریشه های معادله اعداد هستند و در اینجا آنها تابع هستند.
جواب را به صورت حل کلی سیستم معادلات دیفرانسیل می نویسیم:
می توانیم سیستم را فشرده تر بنویسیم:
رایج ترین نوع راه حل با مشتقات نوشته شده در دیفرانسیل است که در آن نماد زیر اتخاذ شده است:
و - مشتقات مرتبه 1؛
و مشتقات مرتبه دوم هستند.
برای سیستم معادلات دیفرانسیل باید راه حلی برای مسئله کوشی پیدا کرد  در شرایط اولیه x(0) = 3، y(0) = 0.
در شرایط اولیه x(0) = 3، y(0) = 0.
هنگام حل، از روش حذف استفاده می کنیم.
معادله دوم سیستم را بگیرید و x را از آن بیان کنید:
![]() ، برای یافتن سریع این معادله از علامت * استفاده می کنیم، زیرا در آینده به آن نیاز خواهیم داشت.
، برای یافتن سریع این معادله از علامت * استفاده می کنیم، زیرا در آینده به آن نیاز خواهیم داشت.
هر دو بخش معادله حاصل را با توجه به t متمایز می کنیم:
![]()
در غیر این صورت به نظر می رسد:
![]()
جایگزین ![]() و
و ![]() در معادله اول سیستم:
در معادله اول سیستم:

بیایید این معادله را تا حد امکان ساده کنیم:

همانطور که می بینید، ما یک معادله همگن مرتبه دوم معمولی با ضرایب ثابت به دست آورده ایم. با مشتقات، به نظر می رسد:
![]() .
.

- ما ریشه های واقعی متفاوتی داریم، بنابراین:
![]() .
.
یک ویژگی پیدا شد. حالا بیایید شروع به جستجوی x(t) کنیم.
بیایید مشتق تابع یافت شده را پیدا کنیم ![]() .
.
با توجه به t متمایز کنید:
حالا بیایید جایگزین کنیم ![]() و
و ![]() به معادله (*):
به معادله (*):
![]()
بیایید معادله حاصل را ساده کنیم:
![]()
بنابراین، ما هر دو تابع را پیدا کردیم.
راه حل کلی سیستم به صورت زیر خواهد بود:

حال بیایید به دنبال یک راه حل خاص مطابق با شرایط اولیه x(0) = 3 و y(0) = 0 بگردیم. برای این کار، معادله دوم را به صورت ترم از معادله اول کم می کنیم.

بیایید ضرایب پیدا شده را جایگزین کنیم:

این یک راه حل خاص سیستم خواهد بود.
باقی مانده است که نتیجه یافت شده را بررسی کنید:
بیایید تحقق شرایط اولیه x(0) = 3 و y(0) = 0 را بررسی کنیم:
x(0) = 4 - 1 = 3
y(0) = 1 – 1 = 0
چک با موفقیت انجام شد.
بیایید پاسخ یافت شده را برای رضایت از معادله اول سیستم بررسی کنیم
یک تابع بگیریم ![]() و مشتق آن را بیابید.
و مشتق آن را بیابید.
در بسیاری از مسائل ریاضی، فیزیک و فناوری، لازم است چندین تابع به طور همزمان تعیین شود که توسط چندین معادله دیفرانسیل به هم مرتبط هستند. مجموعه این گونه معادلات را سیستم معادلات دیفرانسیل می گویند. به طور خاص، چنین سیستم هایی منجر به مشکلاتی می شود که در آن حرکت اجسام در فضا تحت تأثیر نیروهای داده شده مورد مطالعه قرار می گیرد.
به عنوان مثال، اجازه دهید یک نقطه جرم مادی در امتداد یک منحنی خاص (L) در فضا تحت تأثیر نیروی F حرکت کند. تعیین قانون حرکت نقطه، یعنی وابستگی مختصات نقطه به زمان الزامی است.
بیایید این را فرض کنیم
بردار شعاع نقطه متحرک اگر مختصات متغیر نقطه با نشان داده شود، آنگاه
سرعت و شتاب یک نقطه متحرک با فرمول های زیر محاسبه می شود:

(نگاه کنید به فصل ششم، § 5، شماره 4).
نیروی F که تحت عمل آن یک نقطه حرکت می کند، به طور کلی، تابعی از زمان، مختصات نقطه و پیش بینی های سرعت بر روی محورهای مختصات است:
بر اساس قانون دوم نیوتن، معادله حرکت یک نقطه به صورت زیر نوشته می شود:
با طرح بردارهای سمت چپ و راست این برابری بر روی محور مختصات، سه معادله دیفرانسیل حرکت را به دست می آوریم:

این معادلات دیفرانسیل سیستمی از سه معادله دیفرانسیل درجه دوم با توجه به سه تابع مورد نظر هستند:
در ادامه، تنها به مطالعه سیستم معادلات مرتبه اول اکتفا می کنیم نوع خاصبا توجه به عملکردهای مورد نظر این سیستم دارای فرم است

سیستم معادلات (95) را یک سیستم به شکل عادی یا یک سیستم نرمال می نامند.
در یک سیستم معمولی، سمت راست معادلات مشتقاتی از توابع مورد نظر ندارند.
جواب سیستم (95) مجموعه ای از توابع است که هر یک از معادلات این سیستم را برآورده می کند.
سیستم های معادلات مرتبه دوم، سوم و بالاتر را می توان با معرفی توابع مورد نظر جدید به یک سیستم عادی تقلیل داد. به عنوان مثال، سیستم (94) را می توان به شکل عادی به صورت زیر تبدیل کرد. ما توابع جدید را با تنظیم معرفی می کنیم. سپس سیستم معادله (94) به صورت زیر نوشته می شود:

سیستم (96) عادی است.
به عنوان مثال، یک سیستم معمولی از سه معادله با سه تابع مجهول را در نظر بگیرید:

برای یک سیستم نرمال معادلات دیفرانسیل، قضیه کوشی برای وجود و یکتایی یک راه حل به صورت زیر فرموله می شود.
قضیه. اجازه دهید سمت راست معادلات سیستم (97) یعنی توابع در همه متغیرها در یک حوزه G پیوسته باشند و مشتقات جزئی پیوسته در آن وجود داشته باشد. سپس هر مقداری که متعلق به دامنه G باشد، وجود دارد تنها تصمیمسیستمی که شرایط اولیه را برآورده می کند:
برای ادغام سیستم (97)، می توان روشی را اعمال کرد که به وسیله آن سیستم داده شده حاوی سه معادله با توجه به سه تابع مجهول به یک معادله مرتبه سوم نسبت به یک تابع مجهول کاهش می یابد. اجازه دهید نمونه ای از کاربرد این روش را نشان دهیم.
برای سادگی، ما خود را به یک سیستم دو معادله محدود می کنیم. اجازه دهید سیستم معادلات

برای یافتن راه حل برای سیستم به صورت زیر عمل می کنیم. متمایز کردن اولین معادلات سیستم با توجه به ما پیدا می کنیم
![]()
با جایگزینی این برابری عبارت از معادله دوم سیستم، به دست می آوریم
در نهایت، جایگزینی تابع y با عبارت آن از اولین معادله سیستم
![]()
ما یک معادله همگن خطی از مرتبه دوم را با توجه به یک تابع مجهول به دست می آوریم:
![]()
با ادغام این معادله، جواب کلی آن را می یابیم
تمایز برابری که می یابیم
با جایگزینی عبارات برای x و برابری و آوردن عبارت های مشابه، به دست می آوریم
راه حل این سیستم هستند.
بنابراین با ادغام سیستم نرمال دو معادله دیفرانسیل، جواب آن را بسته به دو ثابت دلخواه به دست آورده ایم که می توان نشان داد که در مورد کلیبرای یک سیستم معمولی از معادلات، حل کلی آن به ثابت های دلخواه بستگی دارد.
در بیرون زمان گرمی است، کرک صنوبر پرواز می کند و چنین هوایی برای استراحت مساعد است. مطابق سال تحصیلیهمه خستگی انباشته شده اند، اما انتظار تعطیلات / تعطیلات تابستانی باید الهام بخش باشد تحویل موفقامتحانات و نمرات ضمنا معلم ها هم به تناسب فصل کسل هستن که به زودی من هم تایم اوت می گیرم تا مغز رو خالی کنم. و حالا قهوه، صدای اندازه گیری شده واحد سیستم، چند پشه مرده روی طاقچه و وضعیت کاملاً کارآمد ... ... اوه، لعنت به آن ... شاعر لعنتی.
به تجارت. برای کسی متفاوت است، اما برای من امروز 1 ژوئن است و ما یک کار معمولی دیگر را در نظر خواهیم گرفت تجزیه و تحلیل پیچیده – یافتن یک راه حل خاص برای یک سیستم معادلات دیفرانسیل با روش حساب عملیاتی. چه چیزی را باید بدانید و بتوانید نحوه حل آن را یاد بگیرید؟ در درجه اول، به شدت توصیه می شودرجوع به درس شود لطفاً قسمت مقدماتی را بخوانید، تنظیمات کلی موضوع، اصطلاحات، نشانه گذاری و حداقل دو یا سه مثال را درک کنید. واقعیت این است که با سیستم های دیفیوزر همه چیز تقریباً یکسان و حتی آسان تر خواهد بود!
البته باید بفهمی چیه سیستم معادلات دیفرانسیل، که به معنای یافتن راه حل کلی سیستم و راه حل خاص سیستم است.
یادآوری می کنم که سیستم معادلات دیفرانسیل را می توان به روش "سنتی" حل کرد: روش حذفیا با استفاده از معادله مشخصه. روش محاسبات عملیاتی، که مورد بحث قرار خواهد گرفت، زمانی برای سیستم کنترل قابل استفاده است که وظیفه به صورت زیر فرموله شود:
یک راه حل خاص از یک سیستم همگن معادلات دیفرانسیل را پیدا کنید ![]() مطابق با شرایط اولیه
مطابق با شرایط اولیه ![]() .
.
از طرف دیگر، سیستم همچنین می تواند ناهمگن باشد - با "makeweights" در قالب توابع و در قسمت های مناسب: ![]()
اما، در هر دو مورد، باید به دو نکته اساسی از شرایط توجه کنید:
1) در مورد است فقط در مورد یک تصمیم خصوصی.
2) در براکت شرایط اولیه ![]() هستند به شدت صفر، و دیگر هیچ.
هستند به شدت صفر، و دیگر هیچ.
حرکت کلی و الگوریتم بسیار شبیه به حل معادله دیفرانسیل با روش عملیاتی. از مواد مرجع، همان جدول اصلی و تصاویر.
مثال 1
, ,
راه حل:شروع بی اهمیت است: با جداول تبدیل لاپلاسبیایید از نسخه اصلی به تصاویر مربوطه برویم. در یک مشکل با سیستم های کنترل از راه دور، این انتقال معمولا ساده است:
با استفاده از فرمول های جدولی №№1،2، با در نظر گرفتن شرایط اولیه، به دست می آوریم: 
با "بازی ها" چه کنیم؟ از نظر ذهنی در جدول "x" به "y" تغییر دهید. با استفاده از همان تبدیل های №№1،2، با در نظر گرفتن شرایط اولیه، متوجه می شویم: 
تصاویر پیدا شده را در معادله اصلی جایگزین کنید ![]() :
:![]()
اکنون در سمت چپمعادلاتی که باید جمع آوری شوند همهاصطلاحاتی که حاوی یا . به سمت راستمعادلات باید "ترسیم" شوند دیگرمقررات: ![]()
علاوه بر این، در سمت چپ هر معادله، براکت گذاری را انجام می دهیم: ![]()
در این مورد، در موقعیت های اول باید قرار گیرد و در موقعیت های دوم: 
سیستم معادلات حاصل با دو مجهول معمولا حل می شود طبق فرمول های کرامر. بیایید تعیین کننده اصلی سیستم را محاسبه کنیم:
در نتیجه محاسبه دترمینان، یک چند جمله ای به دست آمد.
نکته فنی مهم!این چند جمله ای بهتر است فوراسعی کنید فاکتورسازی کنید برای این منظور باید تلاش کرد تا حل شود معادله درجه دوم ![]() ، اما برای بسیاری از خوانندگان، چشمی که برای سال دوم آموزش دیده است متوجه این موضوع خواهد شد
، اما برای بسیاری از خوانندگان، چشمی که برای سال دوم آموزش دیده است متوجه این موضوع خواهد شد ![]() .
.
بنابراین، تعیین کننده اصلی سیستم ما این است: ![]()
متشکرم کرامر، جداسازی بیشتر با سیستم، استاندارد است: 
در نتیجه می گیریم تصمیم اپراتور سیستم:
مزیت کار مورد بررسی این است که معمولاً کسرها ساده هستند و رسیدگی به آنها بسیار آسان تر از کسری در وظایف است. یافتن یک راه حل خاص برای DE با روش عملیاتی. پیشگویی شما را فریب نداد - قدیمی خوب روش ضرایب نامشخصکه با کمک آن هر کسر را به کسرهای ابتدایی تجزیه می کنیم:
1) با کسر اول سروکار داریم: 
به این ترتیب: ![]()
2) کسر دوم را به روشی مشابه تجزیه می کنیم، در حالی که استفاده از ثابت های دیگر (ضرایب نامعین) صحیح تر است: 
به این ترتیب: ![]()

من به آدمک ها توصیه می کنم که راه حل عملگر تجزیه شده را به شکل زیر بنویسند:  - بنابراین مرحله نهایی واضح تر خواهد بود - تبدیل لاپلاس معکوس.
- بنابراین مرحله نهایی واضح تر خواهد بود - تبدیل لاپلاس معکوس.
با استفاده از ستون سمت راست جدول، از تصاویر به نسخه اصلی مربوطه حرکت می کنیم:

طبق قوانین لحن ریاضی خوب، نتیجه را کمی شانه می کنیم:
پاسخ:
بررسی پاسخ طبق طرح استاندارد انجام می شود که در درس به تفصیل مورد بحث قرار گرفته است. چگونه یک سیستم معادلات دیفرانسیل را حل کنیم؟همیشه سعی کنید آن را کامل کنید تا امتیاز بزرگی در کار کسب کنید.
مثال 2
با استفاده از حساب عملیاتی، یک راه حل خاص برای سیستم معادلات دیفرانسیل مطابق با شرایط اولیه داده شده پیدا کنید.
, ,
این یک مثال برای خودتان است. نمونه تقریبی طرح نهایی مسئله و پاسخ در پایان درس.
حل یک سیستم ناهمگن معادلات دیفرانسیل از نظر الگوریتمی تفاوتی ندارد، به جز اینکه از نظر فنی کمی پیچیده تر خواهد بود:
مثال 3
با استفاده از حساب عملیاتی، یک راه حل خاص برای سیستم معادلات دیفرانسیل مطابق با شرایط اولیه داده شده پیدا کنید. ![]() , ,
, ,
راه حل:استفاده از جدول تبدیل لاپلاس، با توجه به شرایط اولیه ![]() ، بیایید از نسخه اصلی به تصاویر مربوطه حرکت کنیم:
، بیایید از نسخه اصلی به تصاویر مربوطه حرکت کنیم: 
اما این همه چیز نیست، در سمت راست معادلات ثابت های تنها وجود دارد. در مواردی که ثابت به خودی خود به تنهایی است چه باید کرد؟ قبلاً در این درس صحبت شده است. نحوه حل DE با روش عملیاتی. تکرار می کنیم: ثابت های منفرد باید به طور ذهنی در یک ضرب شوند و تبدیل لاپلاس زیر باید برای واحدها اعمال شود:
تصاویر یافت شده را در سیستم اصلی جایگزین کنید: 
عباراتی را که در آنها وجود دارد به سمت چپ منتقل می کنیم، در قسمت های سمت راست بقیه عبارت ها را قرار می دهیم: 
در قسمت های سمت چپ، براکتینگ را انجام می دهیم، علاوه بر این، به یک مخرج مشترک کاهش می دهیم سمت راستمعادله دوم: 
ما تعیین کننده اصلی سیستم را محاسبه می کنیم و فراموش نمی کنیم که توصیه می شود فوراً سعی کنید نتیجه را فاکتورسازی کنید:
، بنابراین سیستم یک راه حل منحصر به فرد دارد.
جلوتر می رویم: 
بنابراین، راه حل اپراتور سیستم: 
گاهی اوقات می توان یک یا حتی هر دو کسر را کاهش داد و آنقدر خوب اتفاق می افتد که عملاً چیزی برای چیدمان وجود ندارد! و در برخی موارد، بلافاصله معلوم می شود که رایگان است، به هر حال، مثال زیر از درس یک مثال نشان دهنده خواهد بود.
با استفاده از روش ضرایب نامعین، مجموع کسرهای ابتدایی را به دست می آوریم.
تفکیک کسر اول: 
و دومی را می گیریم: 
در نتیجه، تصمیم اپراتور به شکلی که ما نیاز داریم می گیرد: 
با استفاده از ستون سمت راست جداول اصلی و تصاویرتبدیل لاپلاس معکوس را انجام دهید:
اجازه دهید تصاویر به دست آمده را در راه حل عملگر سیستم جایگزین کنیم: 
پاسخ:راه حل خصوصی: 
همانطور که می بینید، در یک سیستم ناهمگن، فرد باید محاسبات زمان برتری را در مقایسه با سیستم همگن. بیایید چند مثال دیگر را با سینوس ها، کسینوس ها تجزیه و تحلیل کنیم، و این کافی است، زیرا تقریباً همه انواع مشکل و بسیاری از تفاوت های ظریف راه حل در نظر گرفته می شود.
مثال 4
با استفاده از روش حساب عملیاتی، یک راه حل خاص برای سیستم معادلات دیفرانسیل با شرایط اولیه داده شده پیدا کنید.
راه حل:من خودم نیز این مثال را تجزیه و تحلیل خواهم کرد، اما نظرات فقط به لحظات خاص مربوط می شود. من فرض می کنم شما در حال حاضر به خوبی در الگوریتم حل مسلط هستید.
بیایید از نسخه اصلی به تصاویر مربوطه حرکت کنیم: 
بیایید تصاویر پیدا شده را با سیستم کنترل از راه دور اصلی جایگزین کنیم: 
ما سیستم را با استفاده از فرمول های کرامر حل می کنیم:
، بنابراین سیستم یک راه حل منحصر به فرد دارد.
چند جمله ای حاصل فاکتوریزه نمی شود. در چنین مواقعی چه باید کرد؟ مطلقا هیچ چیزی. این یکی هم انجام خواهد داد.

در نتیجه راه حل اپراتور سیستم: 
و اینم بلیط شانس! اصلا نباید از روش ضرایب نامشخص استفاده کرد! تنها چیزی که برای اعمال تبدیل های جدول، راه حل را به شکل زیر بازنویسی می کنیم: 
بیایید از تصاویر به نسخه اصلی مربوطه حرکت کنیم:
اجازه دهید تصاویر به دست آمده را در راه حل عملگر سیستم جایگزین کنیم: ![]()
